
La Russia lancia il drone subacqueo (UUV) Sarma per le operazioni sotto i ghiacci
di ANALISI DIFESA (Francesco Ferrante)

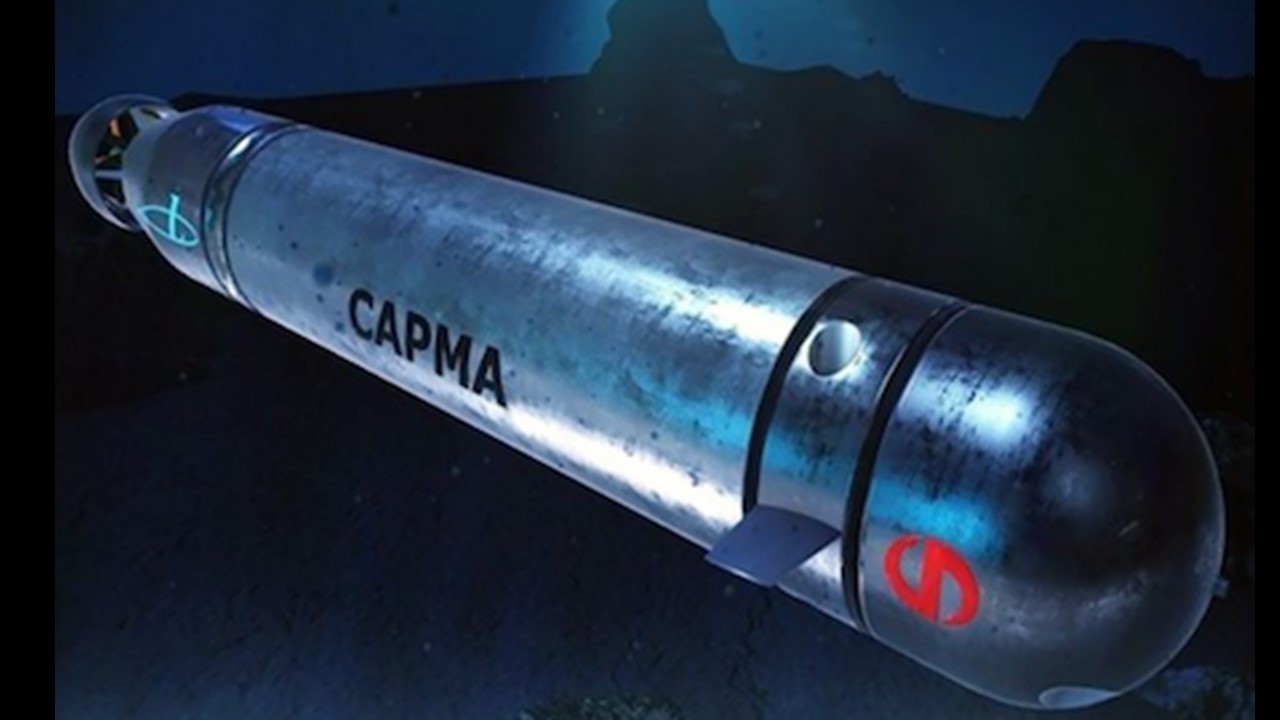
L’agenzia di stampa russa TASS ha reso noto il 17 settembre che il sistema SARMA, drone sottomarino russo (UUV – Autonomous unmanned underwater vehicle), attualmente in fase di sviluppo da parte del Lazurit Central Design Bureau, sarebbe in grado di navigare e comunicare autonomamente sotto la calotta polare artica per lunghi periodi.
Un lancio della stessa agenzia del 21 settembre ha inoltre indicato che la lunga portata e la resistenza di Sarma sarebbero stati resi possibili da un sistema di Alimentazione Indipendente dall’Aria (AIP), ad idrogeno-ossigeno, di costruzione russa.
Secondo quanto riporta la TASS:
- “Il drone subacqueo SARMA sarà in grado di operare autonomamente sotto il ghiaccio per un massimo di 3 mesi, trasmettendo dati e ricevendo nuovi ordini e obiettivi”.
- “Il vettore subacqueo autonomo SARMA sarà in grado di immergersi a una profondità di circa mille metri, eseguire autonomamente compiti assegnati per 3 mesi e coprire distanze di oltre 8 mila chilometri”.
- “Il dimostratore funzionale dell’apparato dovrebbe essere prodotto nel 2022-2023”.
TASS ha anche citato Viktor Litvinenko, Vice-Direttore per la ricerca fisica e tecnica del Fondo di Ricerca Avanzata (FPI), che ha precisato il “Sarma è stato creato per un funzionamento a lungo termine sotto il ghiaccio” e “sarà possibile controllare da remoto questo apparato malgrado opererà sotto il ghiaccio”, aggiungendo circa il Sistema AIP che “si prevede di sviluppare l’unità di propulsione indipendente dall’aria che utilizza idrogeno e ossigeno” e che “ci sono le condizioni necessarie per lo sviluppo del sistema AIP”.
Come detto, Sarma è UUV sviluppato da Lazurit Central Design Bureau. Sebbene non esista uno standard industriale o militare concordato per classificare i veicoli subacquei senza equipaggio, sulla base di classificazioni di veicoli comparabili, SARMA sarebbe considerato un veicolo subacqueo senza equipaggio ad ampio dislocamento (LDUUV).

Il veicolo è di circa 7,5 metri (25 piedi) di lunghezza e 1,5 metri (5 piedi) di diametro, rendendolo paragonabile a, o leggermente più grande dello SNAKEHEAD LDUUV della U.S. Navy. Lunghezza e spostamento possono variare a seconda dei moduli di carico utile installati.
Il linguaggio della narrativa utilizzata da TASS e Litvinenko (“sarà“, “è pianificato“, “un dimostratore funzionale è previsto per essere prodotto nel 2022-2023“) suggerisce che il veicolo sia nella fase di progettazione concettuale e che i piani per la sua produzione (“da iniziarsi nel 2024”) potrebbero rivelarsi ottimistici.
Le foto di un modello di veicolo in mostra a Innoprom-2022 sono visibili qui e qui.
Lo sviluppo di un sistema AIP per un UUV pone una serie unica di sfide tecnologiche, ma è concretizzabile per una base industriale sottomarina altamente qualificata ed esperta come quella russa.
Esiste anche un precedente per l’integrazione dell’AIP negli AUV occidentali. La Cellula Robotics Solus-LR utilizza un sistema di celle a combustibile idrogeno-ossigeno combinato con batterie agli ioni di litio per consentire un’autonomia di 2000 chilometri. Inoltre, ThyssenKrupp Modifiable Underwater Mothership (MUM) XLUUV sarà equipaggiata con un sistema AIP ad idrogeno/ioni di litio, consentendo missioni superiori a 700 chilometri.
Una sfida ancora più grande di quella relativa all’energia, sarà la navigazione e la comunicazione subacquea, impegnativa anche in condizioni ambientali ideali, ma ancora di più nell’Artico, dove la banchisa impedisce in gran parte agli UUV di emergere per ottenere una correzione di navigazione o per trasmettere/ricevere dati e compiti, e dove le condizioni idrologiche dinamiche rendono l’acustica complessa. In generale, ci sono quattro modi in cui i veicoli subacquei autonomi (AUV) possono navigare mentre sono immersi sotto il ghiaccio:
- Navigazione inerziale: gli input provenienti dai sensori del veicolo come una bussola giroscopica o un registro della velocità doppler (DVL) vengono utilizzati per determinare la direzione e la velocità, che vengono quindi elaborati da un computer di bordo per stimare la posizione. Sebbene sia forse l’opzione meno dispendiosa in termini di risorse, la navigazione inerziale è la meno precisa e può causare errori che si aggravano nel tempo.
- Long Baseline (LBL) – Prevede l’uso di fari acustici ormeggiati su fondali marini in posizioni fisse all’interno di un’area di operazioni per fungere da punti di riferimento per la navigazione. LBL è altamente preciso, spesso entro 1 metro e talvolta entro centimetri.
- Ultra Short Baseline (USBL) – Una variante di LBL, USBL utilizza un faro acustico che è collegato o sospeso da un vaso di superficie per interagire con un bersaglio sommerso per determinarne la portata e la posizione. Il vantaggio di USBL è che i veicoli subacquei possono ricevere correzioni GNSS per rendere la navigazione più precisa.
- Boa di navigazione satellitare – Le boe ormeggiate o galleggianti ottengono una correzione da una costellazione di satelliti di navigazione orbitanti, come GPS (Stati Uniti), Galileo (UE), BeiDou (Cina) o GLONASS (Russia) e utilizzano la comunicazione acustica per trasmettere tale fissaggio attraverso la colonna d’acqua. Sebbene la navigazione satellitare possa essere inaffidabile nelle regioni polari, a causa della maggiore inclinazione (64° contro 55° per il GPS e 56° per Galileo), GLONASS sarebbe posizionato in modo univoco per facilitare il posizionamento accurato e affidabile per i sistemi che operano sotto la calotta polare artica.

La navigazione e la comunicazione sotto il ghiaccio a lungo raggio richiederebbero un sostanziale dispiegamento di infrastrutture di supporto. Durante l’esercitazione ICEX 2020, ad esempio, i ricercatori di General Dynamics Mission Systems e MIT hanno utilizzato “ICEX Tracker” – quattro boe acustiche ancorate al ghiaccio, distanziate di soli 2000 mt l’una dall’altra e sospese tra 30 e 100 metri sotto il ghiaccio – per controllare a distanza un singolo Bluefin-21 UUV da un accampamento vicino.
È possibile che la Russia possa già disporre di una rete di navigazione sottomarina artica distribuita. Nel 2016, Concern Okeanpribor ha annunciato di aver sviluppato un “GLONASS subacqueo” chiamato Positioner, una rete di boe di navigazione satellitare galleggianti e ormeggiate che trasmettono i dati di navigazione dai satelliti GLONASS in orbita, fornendo anche un quadro per una rete di comunicazioni subacquee.
La prima rete Positioner doveva essere implementata vicino alla piattaforma di produzione di idrocarburi Prirazlomnoye di Gazprom, situata sulla piattaforma del Mare di Pechora, a circa 60 km dalla costa.
La Russia ha piani ambiziosi per sfruttare i ricchi giacimenti di risorse naturali ubicati nel bacino artico ma anche per difendere i suoi interessi economici regionali. SARMA avrà un ruolo strategico da svolgere in entrambi gli sforzi.
Il progetto Iceberg prevede l’uso di sommergibili autonomi e con equipaggio appositamente progettati per sviluppare i vasti giacimenti di idrocarburi dell’Artico e per dotare gli impianti di produzione dei fondali marini di reattori nucleari per fornire una fonte di energia continua. SARMA potrebbe svolgere un ruolo nello svolgimento dell’esplorazione geologica, nonché dell’ispezione e, se dotato di bracci robotici, nella manutenzione e riparazione delle infrastrutture energetiche e di produzione.
Insieme allo sfruttamento delle risorse, la Russia cercherà di garantire le sue operazioni artiche. Come tale, Project Iceberg integrerà una serie di risorse SubSea e Seabed Warfare (SSW) nel suo quadro operativo.
Una di queste risorse è sicuramente il sottomarino Belgorod, un Oscar II SSGN altamente modificato che funge essenzialmente da nave madre per una vasta gamma di sommergibili (autonomi e con equipaggio), a dual-use. Secondo quanto riferito, la Russia ha anche schierato una rete di sensori acustici nei fondali marini chiamata Harmony. SARMA potrebbe essere integrato in una più ampia rete SSW russa come picchetto o esca Anti-Sottomarino (ASW), collegato acusticamente a una serie di sistemi autonomi e con equipaggio utilizzati per rilevare, identificare e ingaggiare sottomarini NATO.
Dal suo annuncio iniziale nel 2016, è possibile che l’iniziativa Positioner possa essere stata ampliata ad un certo punto per comprendere una fascia più ampia dell’Artico, o forse ripiegata nel più ampio quadro del Progetto Iceberg per migliorare le operazioni SSW.
Mentre sono lontani anni dal dispiegamento operativo, SARMA rappresenta il continuo impegno strategico russo per lo sviluppo di sistemi subacquei autonomi avanzati come strumento per sfruttare e proteggere i propri interessi nell’Artico.


























Commenti recenti